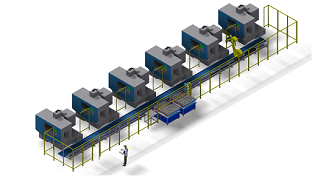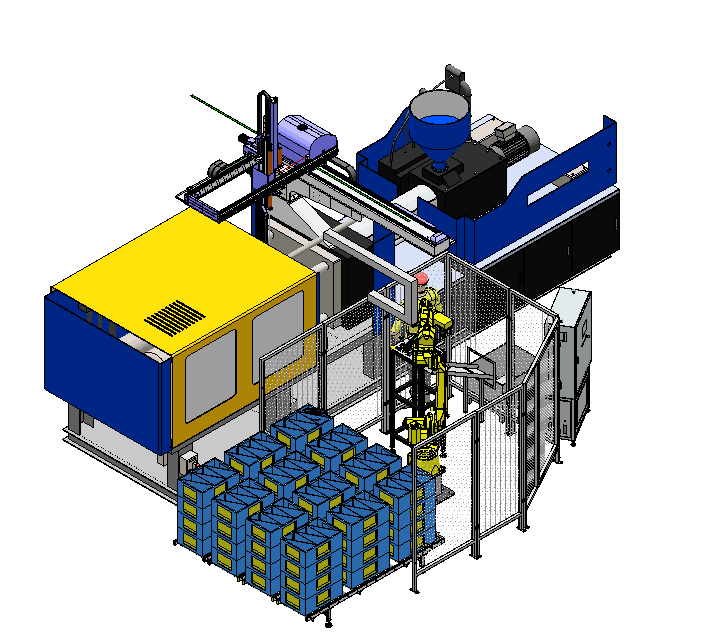
1.The five-axis truss hand puts the finished product on the transfer table, and the robot uses the gripping product to grab the product and place it in the material frame on the left streamline.
2.After the box is full, the robot switches the handle of the frame by quick change, removes the full container, and places it on the unloading conveyor line for discharge.
1.The five-axis truss hand puts the finished product on the transfer table, and the robot uses the gripping product to grab the product and place it in the material frame on the left streamline.
2.After the box is full, the robot switches the handle of the frame by quick change, removes the full container, and places it on the unloading conveyor line for discharge.
Use the FANUC robot with both hands to change the hand grip according to your needs
Use the FANUC robot with both hands to change the hand grip according to your needs